To brush up on my Robot Operating System (ROS) skills from <Robot System Programming>, I took on a day-project to write a ROS2 package simulating an Intel Realsense D435 depth camera in Gazebo. It is written for ROS2 Humble and Gazebo Ignition Fortress, and you can find it here on my Github.
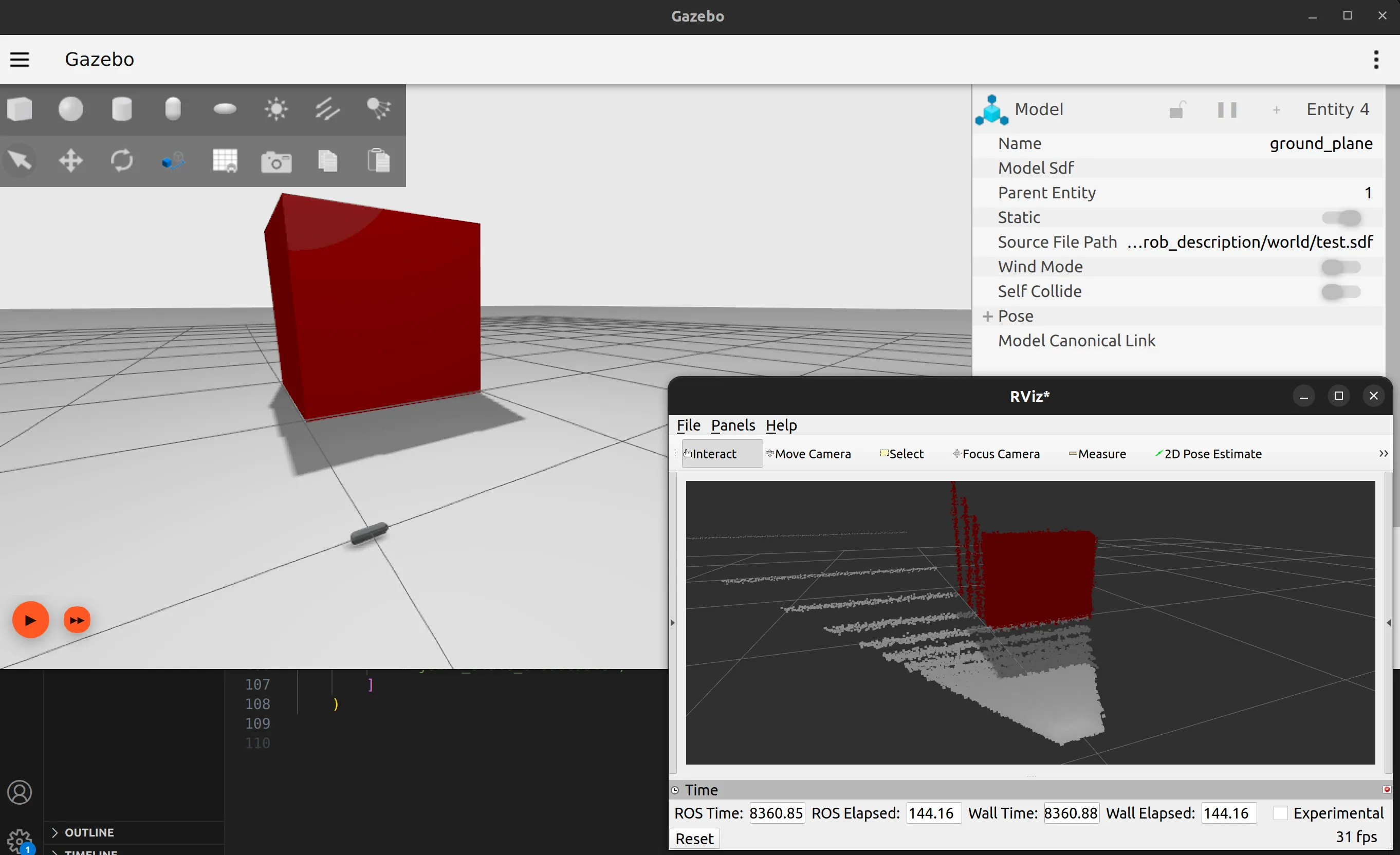
This package is relatively simple since I only spent a few hours on it, but I’ll be updating it later as I need further capabilities for my robot arm project. For now, it simply spawns in the camera and feeds the images to ROS2 topics. You can view the images in RVIZ manually and in the future I plan to add that function as a node to my launch file.
Credit to Open Robotics for the model of the camera.