Multi-Agent Motion Control
My first project with the Agile and Intelligent Robotics (AIRO) Lab at Johns Hopkins University, I worked under Dr. Joseph Moore and Mark Gonzales to equip each Traxxas Maxx high-speed hobby RC car in the fleet with RTK sensors, a Pixracer Pro, and an NVIDIA Jetson Orin AGX. These modifications were necessary to implement the multi-agent Probably Approximately Correct Nonlinear Model Predictive Control (PACNMPC) system described in their previously published paper.
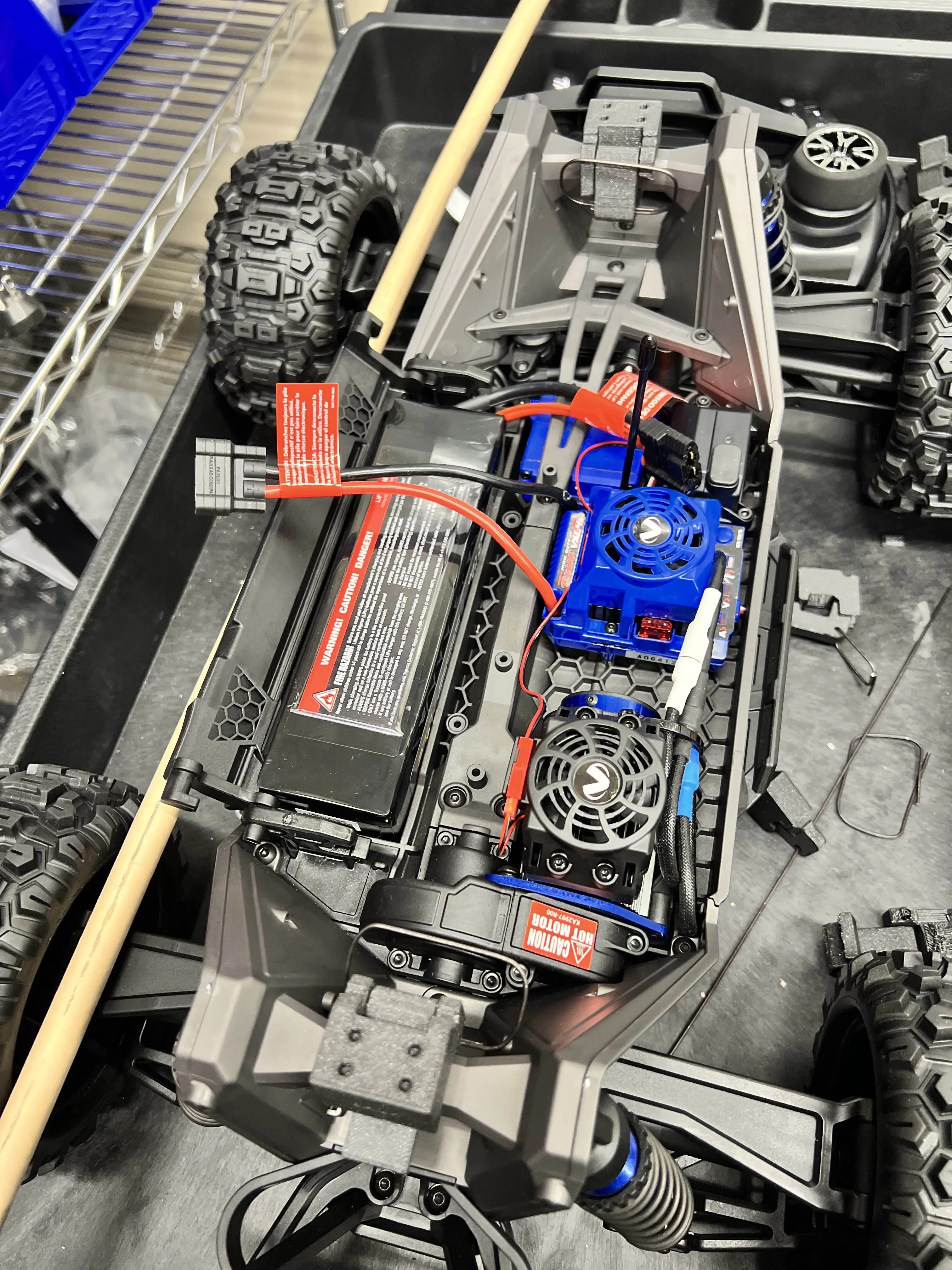
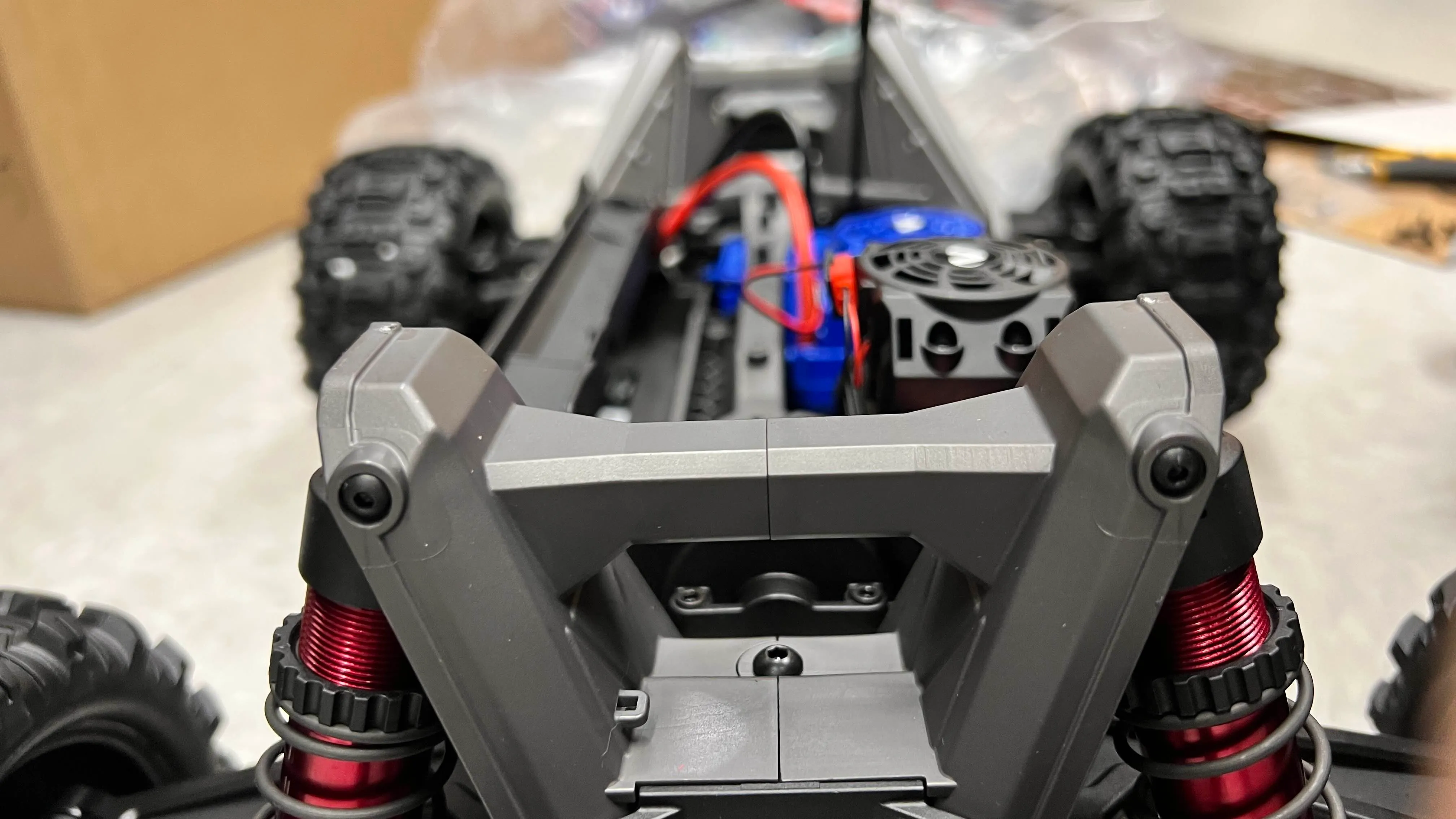
First, to mount the additional equipment onto the car, a mounting plate with a secure, but quick-to-release connection was necessary. Unfortunately, the car did not have any easy-to-access connection points, aside from the irregular beams (with different geometries) that the plastic body latched on to.

I designed a over-center latch mechanism for each beam that secured a laser-cut acrylic mounting plate onto the car. The mechanism itself made of 3D printed PLA and spring steel.
At the same time, Mark and I discussed electronics with Dillon, another member of our lab, and compiled a list of necessary components for our circuit, including batteries and voltage regulators.
We are currently assembling the cars and will begin hardware experiments in August in preparation for submitting our results to the 2025 International Conference on Robotics & Automation (ICRA).